A pH Control Success Story
I recently helped a major chemical company improve the controls of one of their processes that was plagued by a persistent oscillation. The process consisted of a large process loop and the reaction was highly dependent on the pH in the loop. The pH oscillated, driving the oscillation in the entire process. If the pH control could be stabilized, the entire process would stop oscillating.
The pH was controlled with the addition of ammonia. The pH controller directly manipulated the ammonia flow control valve (Figure 1). The engineers and operators told me that the ammonia pressure fluctuated and that this affected the ammonia flow rate and consequently affected the pH. They suspected that the pH control loop and the ammonia-production boiler may even be oscillating against each other.
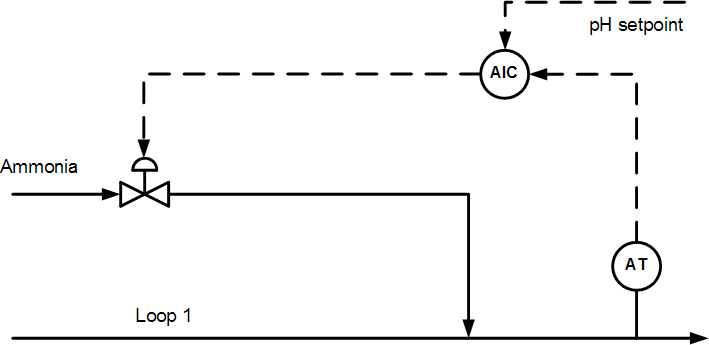
Figure 1. pH control design, as found.
To reduce the effect of ammonia pressure on the flow rate, we implemented a flow controller to keep constant the ammonia flow rate, regardless of the upstream pressure. This flow controller would get its setpoint from the pH controller – classical cascade control. Then, because we wanted to have very tight pH control, we needed to compensate for the change in process gain induced by the nonlinear pH titration curve. We obtained a titration curve from the lab, converted it to a process gain curve (i.e. the change in pH / change in ammonia flow), and normalized the curve around the pH setpoint of 3.5 (Figure 2).
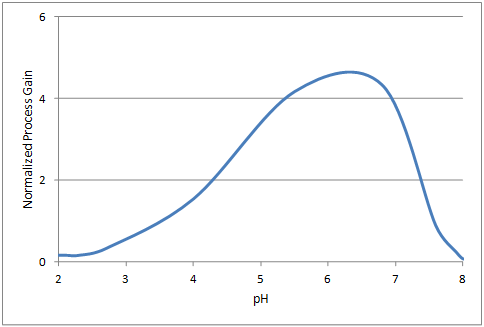
Figure 2. Normalized pH gain curve.
We configured the normalized pH gain curve in a characterizer function block that used pH as its input, and produced the estimated process gain as its output. Then we implemented a parameter for adjusting the gain, divided this gain by the output of the characterizer, and used the result to schedule the gain of the pH controller (Figure 3). Since the flow rate in Loop 1 remained relatively constant, we did not have to use ratio control.
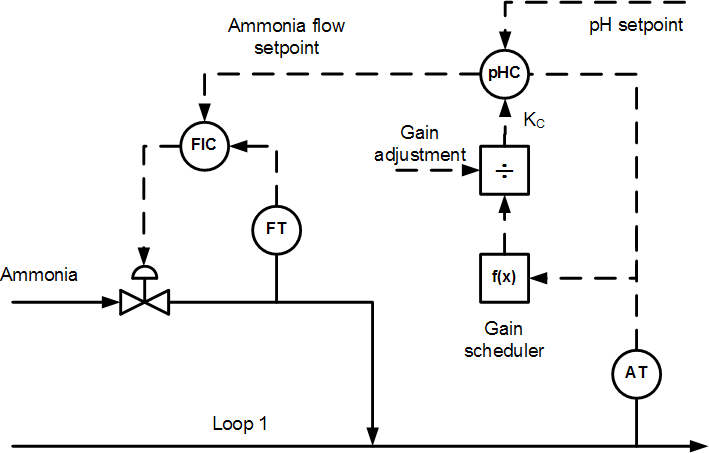
Figure 3. Advanced pH control with a cascaded flow control loop and gain scheduling.
With the flow controller in place, we did small step-tests around the pH control point of 3.5 to establish the process’ dynamic characteristics. This was a major challenge, since the pH varied wildly with the controller in manual. (I’ll write an article about step-testing volatile/turbulent processes sometime, because I often have to deal with this problem). Once we had good estimates for the process gain, dead time, and time constant, we tuned the controller for a fast response.
The results we obtained were very good. Despite the substantial variance in the ammonia pressure, the pH control loop remained stable and controlled the pH very close to its setpoint.
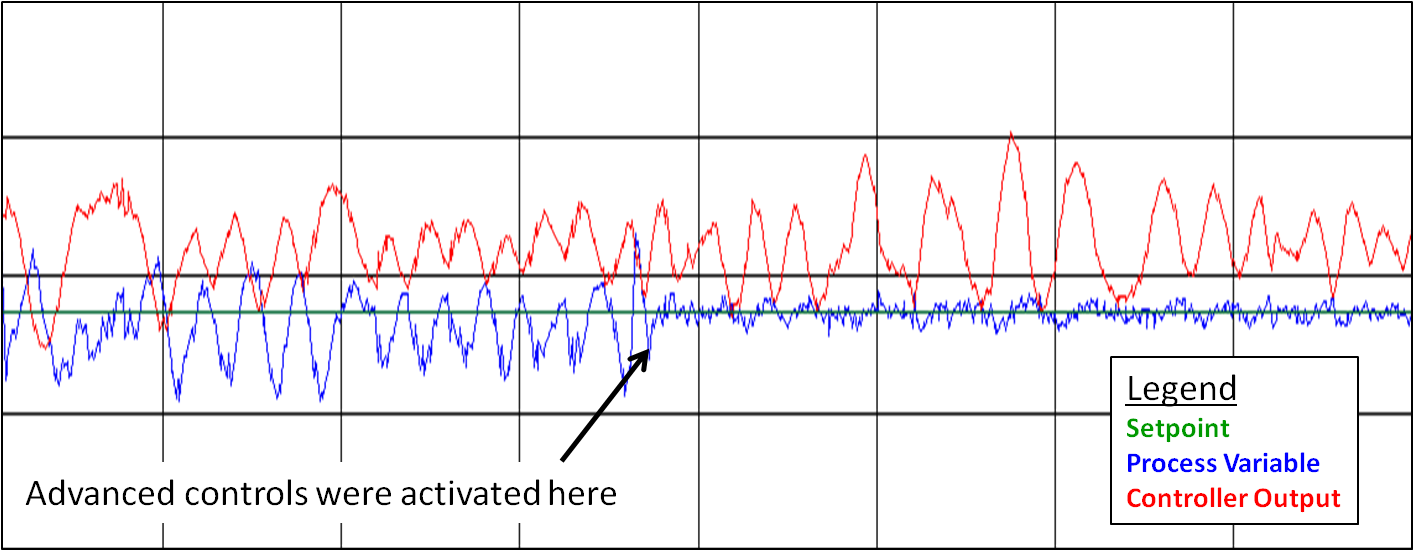
Figure 4. Results of advanced pH Control.
After this, we tuned the ammonia pressure controller and several other loops. This further stabilized the process and reduced the pH variance even more. But it all started with our improvements on the pH loop.
Stay tuned!
Jacques F. Smuts
Principal Consultant of OptiControls, and author of Process Control for Practitioners
