Surge Tank Level Control
A surge tank is placed between two processing units to absorb flow rate fluctuations coming from the upstream process and keep the flow rate to the downstream process more constant. To do this, the tank level has to go up and down. Consequently, the level controller should not try to hold the level as close as possible to its set point; the controller should simply keep the surge tank’s level between its upper and lower limits, and do this with the least possible amount of change to its output.

Figure 1. Surge tank level control loop.
Although there are other methods of controlling surge tank level, the level-averaging method [1] is preferred by most operators and process engineers. This method minimizes control valve movement during disturbances, keeps the level between its limits, and brings the level back to setpoint in the long term (Figure 2). Another method of surge tank control does not bring the level back to setpoint but potentially provides more surge capacity [2]; I’ll write about that method another day.
Surge Tank Level Controller Tuning
To tune the controller for level-averaging control, you need to know the following three things:
1. The residence time of the vessel (tres)
The residence time is the time it would take for the surge tank to drain from 100% level to 0% level if there is no flow into the tank and the outlet valve is 100% open. You can calculate this as the volume of liquid contained in the vessel between 0% and 100% of the span of its level measurement, divided by the maximum flow rate with the outlet valve wide open: tres = V/Qmax. Use the same engineering unit for volume in V and Qmax. If you don’t know the volume and/or maximum flow rate, you can estimate the residence time as the inverse of the process integration rate, tres = 1/ri. You can determine ri through step testing. Be sure to express tres in the same time-base as your controller’s integral time (minutes versus seconds).
2. The largest expected change in flow rate (Δfmax).
This should be expressed as a percentage of maximum valve capacity. You can review historical trends of the loop and find the largest change the controller output has made (under automatic control) to control the level.
3. The maximum tolerable deviation from setpoint (ΔLmax).
This should be expressed as a percentage of the span of the level measurement.
Once you have all of these, calculate tuning settings for the controller with the equations below.
For a controller with an interactive or noninteractive algorithm:
KC = 0.74 Δfmax / ΔLmax
TI = 4 tres / KC
TD = 0
KC is controller gain.
If your controller uses proportional band, PB = 100/KC.
TI is integral time in the same units as tres.
If your interactive or noninteractive controller uses integral gain, KI = 1/TI.
TD is the derivative time.
For a controller with a parallel algorithm:
KP = 0.74 Δfmax / ΔLmax
KI = KP2 / (4 tres)
KD = 0
KP is proportional gain and KI is integral gain using the same time-base as tres.
If your parallel controller uses integral time: TI = 1 / KI
KD is the derivative time.

Figure 2. Response of a surge tank level control loop to a disturbance in inlet flow rate.
Faster tuning is also possible. The following equations will produce tuning settings to bring the level back towards the setpoint much quicker. The level will slightly overshoot the setpoint as a result of the faster response (Figure 3).
For a controller with an interactive or noninteractive algorithm:
KC = 0.5 Δfmax / ΔLmax
TI = 0.74 tres / KC
TD = 0
For a controller with a parallel algorithm:
KP = 0.5 Δfmax / ΔLmax
KI = KP2 / (0.74 tres)
KD = 0
The same parameter descriptions and conversions given previously, apply to the faster tuning equations too.

Figure 3. A faster response to the same disturbance in inflow.
Figure 3. A faster response to a disturbance in inflow.
With these tuning rules, you should be able to get your surge tanks under control, and have them respond appropriately to surges in inflow. Let me know if you need help.
Stay tuned.
Jacques Smuts – author of Process Control for Practitioners.
References:
[1] H.L. Wade, Basic and Advanced Regulatory Control: System Design and Application, 2nd Edition, ISA, 2004.
[2] F.G. Shinskey, Process Control Systems: Application, Design, and Tuning, 4th Edition, McGraw-Hill, 1996.
Leave a Reply

The must-have, practical book for process control engineers and technicians
Get it now on Amazon.com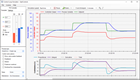
An interactive control loop simulation and visualization tool to learn and/or demonstrate PID control.
Try it for free
7 Responses to Surge Tank Level Control