Minimum IAE Tuning Rules
I came across the Minimum IAE and other error-integral tuning rules very early in my career, but until recently I did not have the original paper describing the development of these rules. A few weeks ago I contacted Dr. C.L. Smith to get a copy of the paper he coauthored in 1967: Tuning Controllers with Error-Integral Criteria (Reference at end of this article). The error-integral tuning rules described in this paper minimize the area that develops over time if a process variable deviates from its setpoint, shown as shaded areas in Figure 1.

Figure 1. Shaded areas indicate the integral of absolute error after a disturbance to a process.
Explain, please!
You may wonder exactly what you are looking at in Figure 1, so let me explain. Imagine we have a running pump for pumping chemicals into a reactor, and a second pump on standby (Figure 2). If the operator starts the second pump, the flow rate (process variable) will increase. As a result, the flow controller will close the control valve a little to get the flow back to setpoint. The control action is not shown in Figure 1, but it is so strong that it over-corrects, causing the flow rate to undershoot the setpoint and oscillate a few times before finally settling out. The shaded areas between the process variable and setpoint are the integral of the error.

Figure 2. The total flow rate will be disturbed when pump 2 starts up.
Tuning Objectives
So, let’s get back to the technical paper. The paper describes tuning rules for minimizing several error-related integrals:
1. Integral of the error squared (ISE)
2. Integral of the absolute error (IAE)
3. Integral of the absolute error multiplied by time (ITAE)
The authors recognized that a controller’s integral and derivative times should be based not only on the length of the process time constant (or dead time as in the case of Ziegler & Nichols), but also on the ratio of dead time to time constant (td / tau).
Optimized for Disturbance Response
The tuning rules were developed for optimizing a control loop’s disturbance response. Tuning for a setpoint change will require different controller settings. However, Smith and Murrill did develop tuning rules for minimizing IAE and ITAE on setpoint changes, but these are outside the scope of this article.
Target Process
The authors also stated that the rules were developed for a 1st-order plus dead-time process. One shortfall is that their tuning rules were designed only for processes with time-constants equal to or longer than dead times (tau >= td). This is not a major restriction since most processes do fall in this category. But it excludes these tuning rules from being used on dead-time dominant processes.
Target Controller and Tuning Rules
The authors developed tuning rules for P, PI and PID controllers for a non-interacting controller algorithm with controller gain, integral time, and derivative time. Since P-only control is hardly ever used, I list only their PI and PID tuning rules in Table 1 below.
The process characteristics are denoted in Table 1 by:
– Process gain = gp
– Dead time = td
– Time Constant = Greek letter tau

Table 1. Minimum ISE, IAE, and ITAE Tuning Rules. Click to enlarge.
Performance Assessment
So, how well do these tuning rules perform? I tested them on simulations of flow and temperature control loops. The PI control rules left the temperature loop with a very oscillatory response, but the PID tuning rules worked a bit better. As expected, the PID rules did not work well at all on the flow loop. Their Minimum ITAE tuning rules seemed to work the best in my opinion because they had the fewest oscillations (Figure 3).

Figure 3. Minimum ITAE tuning on a simulated temperature control loop responding to a disturbance.
Low Stability Margin
My biggest concern is that all of the tuning rules pushed the control loop very close to instability. To analyze stability, we can calculate a loop’s stability margin. The stability margin tells us how much the process gain can increase before a loop will become unstable with its current tuning settings. The stability margin on the temperature loop under Minimum ITAE’s PI control was only 0.7. The PID loop was marginally better at 1.1. Their other tuning rules fared even worse.
The control characteristics of industrial processes can change substantially based on valve position, process throughput, head pressure, pH, etc. Using these tuning rules on real processes will very likely cause stability problems because of their small stability margins. In all fairness this would be similar to using the unmodified Ziegler-Nichols, Cohen-Coon, and many other high-performance tuning rules.
The solution would be to detune the controller (use a lower controller gain) to increase the stability margin and tolerate these changes. I normally use a stability margin of 2 to 3 on loops I tune, sometimes even more. But this would contradict the authors’ original tuning objective of super-fast response. This is yet another example of the inevitable tradeoff between a loop’s speed of response and stability.
Reference to Minimum IAE Paper
Tuning Controllers with Error-Integral Criteria, A.M. Lopez, J.A. Miller, C.L. Smith, and P.W. Murrill; Instrumentation Technology, November 1976, pp. 57 – 62.
More Info
Read more about tuning methods and loop stability in Process Control for Practitioners.
Stay tuned!
Jacques Smuts
OptiControls Inc.
Leave a Reply

The must-have, practical book for process control engineers and technicians
Get it now on Amazon.com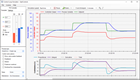
An interactive control loop simulation and visualization tool to learn and/or demonstrate PID control.
Try it for free
3 Responses to Minimum IAE Tuning Rules