Quarter Amplitude Damping
Quarter-amplitude damping is likely the best-known tuning objective, but it’s a poor choice for process stability. Also called quarter amplitude decay or QAD, many tuning rules, including the famous Ziegler-Nichols and Cohen-Coon tuning rules, were designed for this objective. The idea behind quarter-amplitude damping is to eliminate any error between the setpoint and process variable very fast. In fact, the controller responds so fast that the process variable actually overshoots its setpoint and oscillates a few times before it finally comes to rest (Figure 1). The deviation from setpoint gets smaller with each successive cycle at a ratio of 4:1. In Figure 1, the ratio of B/A = 1/4.
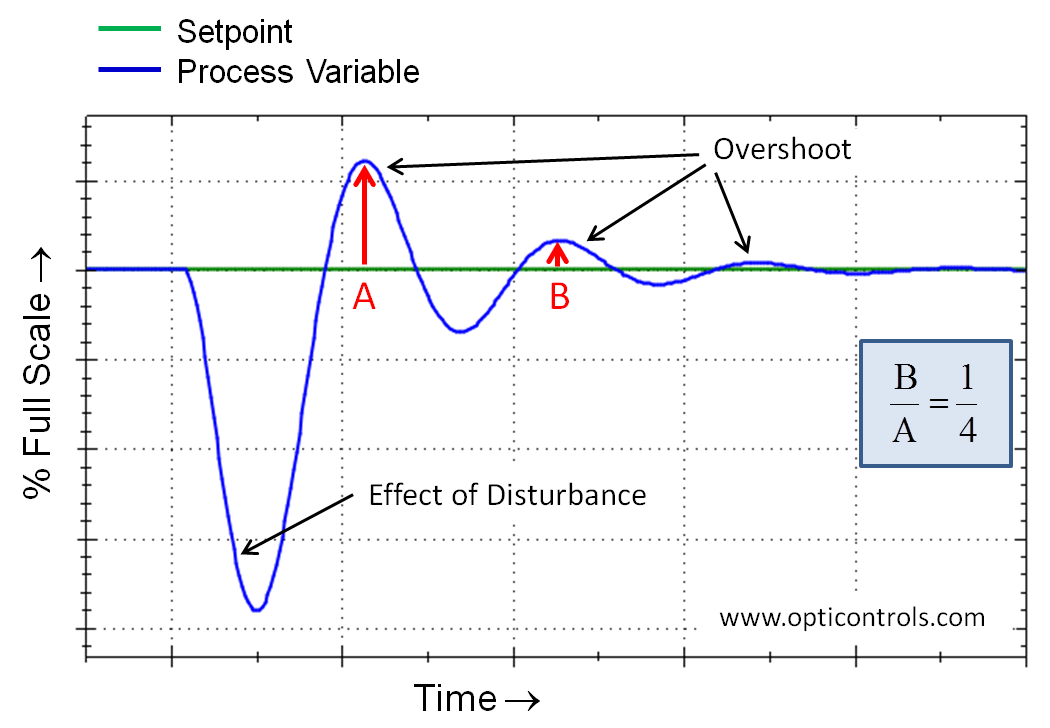
Figure 1. A quarter-amplitude-damping response after a process disturbance.
When developing their tuning rules, Ziegler and Nichols chose quarter-amplitude damping to be “optimum” control loop response. Although QAD performance lies in the middle between a completely dead controller and an unstable control loop, you should realize that quarter-amplitude damping, by design, causes the process to overshoot its set point and to oscillate around it a few times before eventually settling down. Practitioners with solid experience in controller tuning will all tell you that quarter-amplitude-damping is a very poor choice for tuning industrial control loops.Problems with Quarter-Amplitude Damping
Although the quarter-amplitude damping tuning objective provides very fast rejection of disturbances, it creates three problems:
- It makes the loop very oscillatory, often causing interactions with similarly tuned loops. If control loops in a highly interactive process, such as a paper machine, power plant boiler, or hydrodealkylation process, are tuned for quarter-amplitude damping, oscillations affecting the entire process often occur.
- It causes a loop to overshoot its setpoint when recovering from a process disturbance and after a setpoint change. Many processes cannot tolerate overshoot.
- QAD-tuned loops are not very stable and have low robustness. They can very easily become completely unstable if the process characteristics change. For example, such a loop will become unstable if its process gain doubles, which can happen very easily in industrial processes.
Solution
An easy way to minimize all three problems is to reduce the controller gain (detune the controller). The minimum reduction I recommend is to use the calculated Kc divided by two (or more if necessary). For example, if a quarter-amplitude-damping tuning rule suggests using a controller gain of 0.9, then use 0.45 instead. This will greatly reduce oscillations and overshoot in the control loop, and it will increase the loop’s robustness by a factor of two. (Please note that if your controller uses a parallel algorithm, you have to reduce Kp, Ki, and Kd to achieve the equivalent effect).
Stay tuned!
Jacques Smuts
Principal Consultant at OptiControls, and author of Process Control for Practitioners.

Jacques,
I have worked with boiler/turbine controls for many years and could not agree more. So many of the processes are interactive that they must be tuned wthout oscillation, generally with maximum overshoot of about 5%.
Of course there is also the problem of over-active actuators, which can cause premature aging, wear, linkage hysteresis, etc.
I have found Lambda tuning to be a very successful method for many power plant control loops.